
شبیه سازی دینامیکی روبات عقرب در نرم افزار آدامز- Scorption Robot
شبیه سازی دینامیکی روبات عقرب در نرم افزار adams
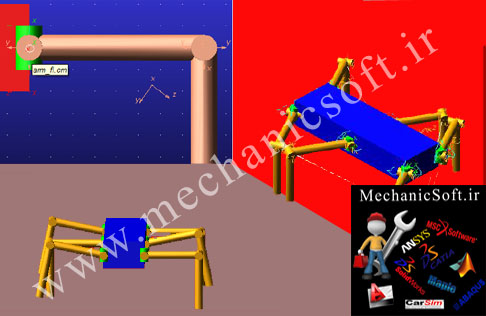
روبات عقرب یک روبات شش پا است که توانایی راه رفتن در شرایط مختلف ناهمواری دارد. این روبات روبات سریع است و امروزه در مناطق سری و نظامی کشورهای پیشرفته بسیار روی این روبات کار می شود . خصوصیت دیگر این روبات این است که در اثر تخریب قسمتی از آن قابلیت انجام ماموریت را دارد. برای مثال در صورت از بین رفتن یک پای روبات روبات میتواند به حرکتش ادامه دهد. نرم افزار آدامز یک نرم افزار تحلیل دینامیکی قدرتمند برای شبیه سازی حرکت روبات ها هست. این نرم افزار به راحتی می تواند حرکت مفاصل و تماس را مدلسازی کند. گروه مکانیک سافت در پروژه ای به مدلسازی و شبیه سازی این مکانیزم در نرم افزار آدامز پرداخته است. این روبات از شش پا تشکیل شده است در محل اتصال پا به بدنه دو مفصل وجود دارد که در هر مفصل دو موتور قرار گرفته است پس در مجموع این روبات دارای شش پا و دوازده موتور برای حرکت پاها است. حرکت پاهای روبات در مقاله های متفاوت با توابع مختلفی تعریف شده است اما میتوان شایع ترین نوع حرکت آن را اینگونه در نظر گرفت که مفصلی که برای بالا بردن پای روبات استفاده میشود دارای حرکت نیم سیکل سینوسی و نیم سیکل ثابت و مفصلی که برای جابجایی روبات به سمت جلو استفاده میشود دارای حرکت سینوسی است.
جهت مشاهده ی ویدیوی سایر کارهای گروه مکانیک سافت میتوانید به اینجا مراجعه نمایید.
در صورت داشتن هر گونه سوال در خصوص نرم افزار آدامزدر قسمت نظرات مطرح نمایید. همچنین جهت درخواست پروژه یا مشاوره در خصوص نرم افزار آدامز،تحلیل دینامیکی ، طراحی مکانیزمها، حل معادلات دینامیکی و … به قسمتتماس با ما در بالای سایت با ما مکاتبه کنید.

مرسی
خیلی جالب بود
سلام
چون محیط طراحی کتیا قوی تر از آدامز هستش من برای طراحی از کتیا استفاده میکنم بعد برای تحلیل دینامیکی طرح رو به نرم افزار آدامز import میکنم
مشکل من از جایی شروع میشه که آدامز، فقط مشخصات هندسی طرح رو میخونه و متریال و قیود قطعه رو باید دوباره توی آدامز مشخص کنی، بعد تعریف متریال و قیود در آدامز و تحلیل …..
…. اگر من بخوام تغییری در هندسه قطعات بدهم راهی ندارم جز اینکه این سیکل رو از اول تکرار کنم !!!
برای جلوگیری از این اتلاف وقت و دوباره کاری ( یا به اصطلاح مهندسی هم زمان کردن ) چه باید بکنم
سلام
خب همون جا(تو کتیا) جنس مواد رو هم بهش بدید…
البته کتیا رو نمیدونم چ جوری…! ولی تو سالید اگه بخواید این کارو بکنید، اول از قسمت material( زیر شاخه جسم مورد نظر)، جنستونو انتخاب کنید..
بعدش به صورت زیر عمل کنید…
Evaluate–Mass Properties—-Recalculate
موفق باشید.
درسته توی کتیا و سالیدورکز میشه جنس قطعه رو مشخص کرد . اما هندسه ی قطعه رو هر با که ایمپورت میکنید باید تغییر بدین . منظور دوستمون هم بیشتر هندسه ی قطعه است نه جنس چون تخصیص جنس توی نرم افزار ادامز یک بار که انجام بگیره کافی هستش
با سلام. در تحلیل دینامیکی شما نیاز به جزئیات قطعه ندارید. یک سری مشخصات براتون مهمه مثلا محل اتصال جوینت ها و موقعیت دو جوینت روی یک قطعه بنابراین میتونید شکل ساده شده ای از نرم افزار و توی آدامز به صورت پارامتری مدل کنید و سپس از اون رو بهینه سازی کنید تا به مقدار دلخواه برسید. سپس مدل دلخواهتون رو بر اساس تحلیل در نرم افزار کتیا یا سالیدورکز به صورت نهایی در بیارید.
البته نا گفته نماند بسیاری از نرم افزارها مثال نرم افزار انسیس ورکبنچ به سالیدورکز کوپل میشن و میشه این کار رو که تحلیل دینامیکی هست توی انسیس ورکبنچ قسمت اکسپلیسیت داینامیک انجام داد.
Joe Bonamassa is a famous country singer, so don’t miss the possibility to visit Joe Bonamassa Tenessy tickets