آشنایی با کتابخانه ی SimMechanic در Simulink
آشنایی با کتابخانه ی SimMechanic در Simulink
یکی از کتابخانه های کاربردی در سیمولینک Simulink کتابخانه ی سیم مکانیک SimMechanic است. در این پست هدف معرفی و آشنایی مخاطبان با کتابخانه ی SimMechanic است. در پست های آتی مطالب آموزشی از این نرم افزار قرار داده خواهد شد.
از این بسته ی نرم افزاری برای شبیه سازی حرکت انتقالی یا دورانی در سیستم های مکانیکی استفاده می شود. مدل ساخته شده در این کتابخانه ی سیمولینک، روابط هندسی و سینماتیکی و سینتیکی مکانیزم ها، و یا به عبارتی فیزیک مدل را بررسی می کند. برای آشنایی کلی با بلوک ها به ادامه مطلب مراجعه نمایید.
در صورت داشتن هرگونه سوال، لطف کنید سوالاتتون رو در قسمت نظرات مطرح کنید. و در صورت داشتن پروژه در خصوص نرم افزار MATLAB و مهندسی مکانیک ، کنترل، محاسبات عددی، SIMULINK، SimMechanics میتوانید از طریق ایمیل و تلفن در قسمت تماس با ما، ارتباط برقرارکنید.
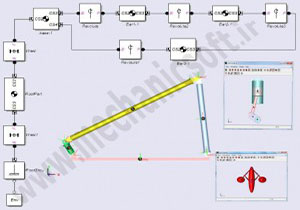
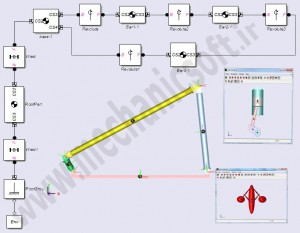
از این بسته ی نرم افزاری برای شبیه سازی حرکت انتقالی یا دورانی در سیستم های مکانیکی استفاده می شود. مدل ساخته شده در این کتابخانه ی سیمولینک، روابط هندسی و سینماتیکی و سینتیکی مکانیزم ها، و یا به عبارتی فیزیک مدل را بررسی می کند. این کتابخانه ی سیمولینک از بلوک های متنوعی تشکیل شده است. جهت آشنایی با کتابخانه ی SimMechanic در Simulink بلوک های اصلی آن به شرح زیر است.
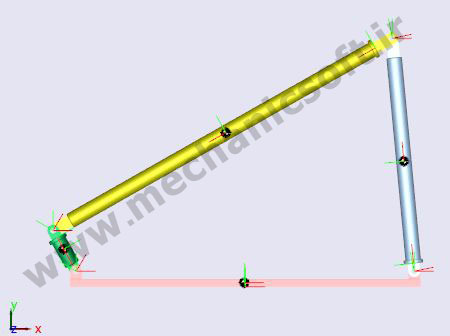
بلوک های Bodies : برای مشخص کردن هر مکانیزم باید برای هر بازوی آن یک بدنه تعریف کرد معمولا برای تعریف بدنه از سه دستگاه مختصات Coordinate System استفاده می شود. یکی مربوط به مرکز ثقل بازو CG، دیگری محل اتصال بازو به مفصل اول CS1 و دیگری محل اتصال بازو به مفصل دوم CS2 است. البته باید این نکته را خاطر نشان کنم که میتوان به دلخواه مختصات دیگری و محل های اتصال دیگر هم تعریف کرد. این مخصات پیش فرض برای یک بازوی ساده است. در درس های آتی توضیحات تکمیلی مربوط به هر قسمت به صورت درس آورده خواهد شد.
- بلوک های Constraint & Drivers: بلوک های موجود در این قسمت برای اعمال محدودیت و قید بر روی درجات آزادی بین قسمت های مختلف Body ها استفاده می شوند. به کمک این بلوک ها میتوان درجات آزادی یک سیستم را محدود کرد. این بلوک ها شامل درایور ها و قید ها می شودند. جزئیات مربوط به این بلوک ها در درس های آتی توضیح داده خواهند شد.
- بلوک های Force Elements: این بلوک برای اعمال نیرو و گشتاور دلخواه بین Body ها و همچنین بر روی مفصل ها استفاده میشود. این قسمت از دو بلوک تشکیل شده است یکی برای اعمال نیرو و گشتاور دلخواه بر روی اعضا و دیگری برای اعمال نیرو و گشتاور دلخواه بر روی مفاصل است.

آشنایی با کتابخانه ی SimMechanic در Simulink - بلوک های Interface Elements: برای برقراری رابطه ی بین یک مفصل پریسماتیک و یا چرخشی با یک المان مکانیکی که حرکت انتقالی یا چرخشی انجام می دهد استفاده میشود. توضیحات تکمیلی در درس آتی داده خواهد شد.
- بلوک های Joints: مفصل برای بر قراری اتصال فیزیکی بین دو جسم و همچنین اعمال درجه آزادی یک جسم نسبت به جسم دیگر استفاده می شود. و با اعمال مفصل های مختلف که وجود دارد درجات ازادی Body ها محدود می شودند. که برخی از انواع آن شامل مفصل چرخشی، یونیورسال، رفت و برگشتی، صفحه ای، جوش، استوانه ای و… است. توضیحات بیشتر مربط به این مورد را نیز به پست های آتی موکول میکنیم.
- بلوک Sensors & Actuator: این بلوک ها برای برای اعمال عملگر بر روی سیستم (مثلا اعمال نیروی سینوسی به یک مفصل) و همچنین از سنسور برای اندازه گیری خروجی های مختلف (مثلا اندازه گیری سرعت زاویه ای یک مفصل) استفاده می شود.
- بلوک Utilities: برخی از بلوک های کاربردی دیگر دراین قسمت هستند که در صورت استفاده در دروس آتی توضیح داده خواهند شد.
در صورت داشتن هرگونه سوال، لطف کنید سوالاتتون رو در قسمت نظرات مطرح کنید. و در صورت داشتن پروژه در خصوص نرم افزار MATLAB و مهندسی مکانیک ، کنترل، محاسبات عددی، SIMULINK، SimMechanics میتوانید از طریق ایمیل و تلفن در قسمت تماس با ما، ارتباط برقرارکنید.
باعرض سلام وخسته نباشید
ببخشید معرفی وکاربردهای هریک از بلوکهای کتابخانهSimMechanic رو ازکجا پیدا کنم؟
خوب توی هلپ نرم افزار متلب توضیحات خوبی داده, در پست های بعدی در سایت مطالب آموزشی در این خصوص قرار میدم.
ببخشید مهندس معرفی وکاربردهایه بلوکهای SimMechanic قسمت اول پروژه مه…میخواستم ببینم اگه امکانش هست تواین سایت درخواست بدم انجامش بدهند؟
با سلام. من در خصوص این نرم افزار اموزشهای زیادی رو قراره توی سایت قرار بدم. اما اگر پروژتون خاص هستش ایمیل بفرمایید.
موفق باشید.
بی صبرانه منتظر آموزش بعدی هستیم
سلام محسن رضایی عزیز،
متشکر از مطالب ارزندتون.
ببخشید امکان داره مطالبی که گفتید رو هر چه زودتر بذارید تا استفاده کنیم
با سپاس
با سلام. مرسی. لطف دارید شما. من در حال اماده کردن مطالب جذابی در خصوص سیم مکانیک هستم که به زودی در پست های جدید قرار خواهم داد.
سلام.روز یخیر.
چطور میشه بدون استفاده از کنترلر روی بازوی سیلیندریکال محدودیت گذاشت که موقع اعمال نیرو یا هر خرکتی از جاش در نره تو انیمیشن؟
ممنونم
توی قسمت actuator ها قسمتی هست مربوط به اعمال محدودیت که باید اونجا اعمال کنید. یعنی باید اول یک عملگر بگذارید و سپس عملگر رو محدود کنید.
سلام آقای دکتر متلب من ۲۰۱۷ است و در کتابخانه simmechanic ندارد چطور می تونم از اینترنت دانلود کنم با تشکر از شما
سلام توی متلب های ورژن جدید دیگه simmechanic نیست و به جای اون simscape multibody اومده که کمی از لحاظ کارایی با سیم مکانیک متفاوت هست اگه نیاز به آموزش داشتید من در خدمتتون هستم.