روباتهایی که پس از دریافت علامت به کمک یکدیگر می آیند.
روباتهایی که پس از دریافت علامت به کمک یکدیگر می آیند.
روباتهایی که پس از دریافت علامت به کمک یکدیگر می آیند
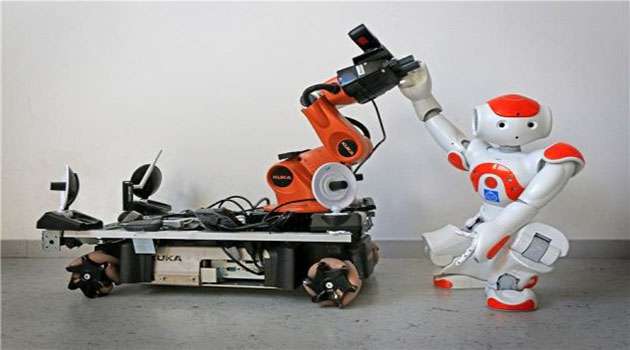
خلاصه : گاهی با اشاره ی دیگران یا علامت دادن آنها، به منظور کمک به سمت آنها می رویم. به تازگی چنین ویژگی برای روبات ها نیز ایجاد شده است. محققان پروژهی جدیدی را به پایان رسانده اند. در ان روباتها با اشاره دست و بدن یا همان زبان بدن رفتار یکدیگر را شناسایی و به کمک یکدیگر می شتابند.

محققان به تازگی پروژه ای را به اتمام رسانده اند که روبات ها را قادر می سازد که از یکدیگر درخواست کمک کنند. همچنین بتوانند روبات هایی که به کمک نیاز دارند را شناسایی و بر اساس این شرح وظایف خود را عوض و در راستای کمک به روبات نیازمند به کار گیرند.
بر اساس گفته ی محقق این موضوع ” روبات می تواند کاری را که در حال انجام آن است متوقف کند و به کمک روبات نیازمند بشتابد. این قابلیت که رفتار روبات ها را بیشتر به انسانها شبیه می کند، روبات ها را قادر می سازد تا با شرایط جدیدی مواجه شوند. و تصمیم گیری های جدیدی بر اساس شرایط انجام دهند.
در مورد روبات های همکار قبلا هم تحقیقات زیادی انجام شده بود .برای مثال کنترل مجموعه ای از روبات ها برای انجام کار خاصی مثلا حرکت دادن یک جعبه. اما این مفهوم در کار جدید محققان بسیار گسترده تر شده است. به عبارتی روبات می تواند خارج از شرح وظایف خود تصمیم گیری نموده و روبات دیگری را که شرح وظایفش چیز دیگری است کمک کند.
این پروژه ی جدید در سال 2016 با همکاری محققین سه کشور فنلاند، یونان و فرانسه انجام شد. در این پروژه کمک و تصمیم گیری بدون دخالت انسان در کلیه مراحل انجام وظیفه ی روبات صورت میگیرد.
لازم به ذکر است در پژوهش های مربوط به روبات های همکار که امروزه یکی از فیلد های روباتیک است، همواره سعی بر آن است که بتوان رفتار اجتماعی روبات ها را با استفاده از هوش مصنوعی ارتقاء داد.
اطلاعات بیشتر در لینک