همه چیز درباره ی روباتها در صنعت
همه چیز درباره ی روباتها در صنعت
همه چیز درباره ی روباتها در صنعت : در این پست مقاله ای در خصوص روبات های صنعتی در اختیار دوستداران روباتیک قرار داده ام .مقدمه ای از روبات های صنعتی، دلایل استفاده از آنها در صنعت، شرکت های معروف تولید کننده ی روبات های صنعتی ، برخی از روبات های صنعتی در جوشاری و ساخت و تولید از مطالب عمده ی عنوان شده در این پست است.
مقدمه
یکی از مهمترین مسائل مهندسی مکانیک در شاخه دینامیک و کنترل، مسئله روبات و تحلیل حرکت آنهاست. اهمیت این موضوع با پیشرفت تکنولوژی روز به روز افزایش می یابد، امروزه تقریبا در تمام قسمتهای صنعت روباتها کاربرد فراوان دارند، در تمام کارخانجات ساخت و تولید قطعات و مواد مختلف وجود روباتهای بازو دار ضرورت دارد. این کاربرد فقط به صنعت محدود نمیشود در علوم پزشکی و زیست شناسی، نظامی،و…وجود روباتها اهمیت پیدا کرده است، با پیشرفت کامپیوتر و هوش مصنوعی کاربرد روباتها چندین برابر شده است، به دلیل اینکه با پیشرفت علوم مذکور عملا روباتها هوشمند شدند و از حالت برنامه ریزی ساده بیرون آمده و از خود رفتارهای انعطاف پذیری به تناست شرایط انجام میدهند
هدف در این پژوهش بررسی روباتهای صنعتی و کاربردهای آنان در صنعت میباشد. روند کلی گزارش کار به شکل زیر است،در فصل دوم تاریخچه ای کلی از علم رباتیک ارائه شده است. در فصل سوم به بررسی نقش روباتها در صنعت و بررسی روباتهای صنعتی پرداخته شده است.
تاریخچه روباتها
ربات از کلمه چکوسلواکی Robata به معنی کوشش اجباری گرفته شده است.که اولین بار در سال 1921 توسط یک نمایش نامه نویس چکوسلواکی به نام karel capek که در نمایش نامه اش نقش ربات را به شکل یک موجودی که حرکات شبیه به یک انسان را انجام میدهد و بیشتر یک داستان تخیلی و هیجان انگیز را ساخته بود به مردم معرفی کرد. صنعت ربات ها یک شیوه ی مکانیکی است که با حرکات انسان جور است و در رتبه ی مشخصی از حرکات انسان قرار دارد.ربات ها در مواقی که در کارها برای انسان خطراطی وجود دارد جایگزین نیروی انسانی میشوند و همچنین در کارهایی که احتیاج به آماده سازی نیرو و توان بیشتری و دقت بالاتری نسبت به عملکرد انسان ها باشد به کار میروند. مثلا بعضی از ربات ها تماما در محیط کار حرکت میکنند و قطعات را جابه جا میکنند و تحویل میدهند. بیشتر مردم فکر میکنند که ربات ها شبیه انسان یا نوعی هیولا هستند که در داستان های تخیلی و فیلم های افسانه ای دیده شده اند.در صورتی که ما انسان ها توانایی و فنی را داریم که بتوانیم ماشین ها را اختراع کنیم پس ربات ها هم یک اختراع ساده بدست انسان ها است. حرکت ربات ها در واقع گرفته شده از حرکات انسان ها که موضوع مشکلاتی را در بر دارد. میدانیم که مغز انسان هزاران تکه های مختلفی از داده ها را که چشم ما میبیند را پردازش میکند و بعد مغز ما فرمان میدهد که یک جسم را چه طور جابه جا کنیم که با حرکت بازو ها و مچ دست و انگشتان مان قطعه را لمس کرده و آن را بین انگشتان نگه داشته و بر میداریم که در حین انجام این کارها هیچ تغییری در ما و قطعه بوجود نمی آید.حال ما با اختراع ربات ها به سادگی میتوانیم این وظیفه را به آنها محول کنیم.یعنی ربات ها موقعیت را شناسایی کرده و به جسم دسترسی پیدا میکند و آن را بر میدارد و جابه جا میکند ولی ممکن است در حین انجام این کار تغییرات و خطایی رخ دهد که کار ما به نتیجه نرسد. همانطور که مغز به بدن انسان فرمان میدهد کامپیوتر هم ربات را کنترل میکند که کامپیوترها باید توسط یک متخصص فنی برنامه ریزی بشوند. امتیازاتی که ربات ها نسبت به نیروی انسانی دارند قابلیت تکرارپذیری کار با دقت بالا است در صورتی نیروی انسانی در فعالیت های تکراری در دفعات تکرار دقت پایینی دارد و حرکات شبیه به هر دفعه را انجام میدهد و همچنین ربات ها در انجام حرکات تکراری خستگی ناپذیرند و این کارها را بادقت کمتر از یک هزارم اینچ انجام میدهند. ربات ها در طول 24 ساعت روز بدون خستگی و با دقت بالا کارهای زیادی انجام میدهند.مثل:بسته بندی کردن اجسام بلند کردن و قرار دادن محصولات به داخل ماشین ها عمیات جوشکاری و… .
چهل سال پس از اين تكنولوژي جديد « روبوتيك صنعتي » پا به عرصه گذاشت و امروز روبوت ها دستهاي مكانيكي بسيار خودكارند كه كامپيوتر آنها را هدايت مي كند.نيمه هاي قرن هيجدهم جي دو وكانسون عروسكهاي مكانيكي به اندازه انسان ساخت كه موزيك مي نواختند.در سال 1801 «ژاكار» دستگاهي براي بافندگي ساخت كه برنامه پذير بود.در سال1805 « ميلادرت » عروسكي مكانيكي ساخت كه مي توانست نقاشي كند.در سال 1946« جی سی دول»» مخترع امريكايي وسيله اي براي كنترل ساخت كه مي توانست علائم الكتريكي را به طور مغناطيسي ثبت كند و آنها را دوباره براي كار يك ماشين مكانيكي باز سازي نمايد.
در سال 1951 ساخت تله اپراتور ( بازوي مكانيكي با کنترل از راه دور ) براي كار با مواد پرتوزا ( راديواكتيو)به نمایش در آمد.در سال 1952 اولین ماشین کنترل عددی ایجاد بعد ها تکامل یافت و در سال 1961 منتشر شد.در سال 1954« كن داورد » مخترع بريتانيايي تقاضاي ثبت اختراع روبوت را مطرح كرد.در سال 1959 شركت پلانت نخستين روبوت تجاري را عرضه كرد . اين روبوت با بادامك و كليد حدي كنترل مي شد.
در سال 1960 نخستين روبوت يوني ميت[1] بر پايه « انتقال برنامه ريزي شده كالا » عرضه شد . اين روبوت داراي محرك هيدروليكي بود و در آن از اصول كنترل عددي براي مهار بازوي مكانيكي استفاده شده بود.در سال1961 در كارخانه فورد ، روبوت يونيميت براي راهبري ماشين ريخته گري تحت فشار نصب شد.در سال 1966 يك شركت نروژي روبوتي براي رنگ پاشي نصب كرد.در سال 1968 روبوت سياري به نام شيكي در موسسه پژوهشي استانفورد ساخته شد، اين روبوت داراي حساسههاي گوناگون از جمله دوربين حساسههاي لمس كننده بود و مي توانست به اطراف حركت كند.
در سال 1971 «دست استانفورد » یک دست برقی روبات بود که در دانشگاه استانفورد ساخته شد.در سال 1973 روبوت كامپيوتري به نام ويو[2] در موسسه پژوهشي استانفورد عرضه شد و به دنبال آن زبان ال[3] عرضه شد، بعدها اين زبان به زبان تجاري وال وال[4] تبديل شد.
در سال 1974شركت « آ.ث .آ » روبوتي كاملاً برقي به نام IRb6 عرضه داشت.در سال 1974 شرکت سیناتی روبوت T3را با کنترل کامپیوتری عرضه کرد.در سال 1975 روبوت « زيگما » ي « اليوتي » در عميلات مونتاژ به كار گرفته شد، اين يكي از نخستين كاربردهاي روبوت در خط مونتاژ بود.در سال 1975 روبوت روما[5] ماشین یونیورسال برنامهپذیر برای مونتاژ عرضه شد.
درسال 1980 سيستم برداشتن جعبه با روبوت در دانشگاه ردآيلند به نمايش درآمد، اين روبوت توانست با استفاده از بينايي ماشين، قطعات پراكنده را از جعبه بردارد.درسال 1981 یک روبوت با محرک مستقیم در دانشگاه « كارنگي ملون » ساخته شد . در اين روبوت از يك الكتروموتور نصب شده روي بازوي مكانيكي، بدون استفاده از رابط هاي مكانيكي معمول در اكثر روبوت ها ، استفاده شده بود .
در سال 1982 پس از چند سال تلاش IBM روبوت RS-1 را عرضه کرد که دارای قابی جعبه ای بود و از بازویی با لغزنده قطری استفاده شده بود،در برنامه ریزی آن از زبان برنامه ریزی AMC استفاد شده میکرد.در سال 1983 گزارشهایی در مورد پژوهشهای شرکت وستینگهاوس به سرپرستی بنیاد علوم آمریکا در مورد « سيستم مونتاژ برنامه پذير و قابل تطبيق » منتشر شد که طرح آزمایشی برای برنامه ریزی انعطاف پذیر خط مونتاژ با استفاده از روبوت محسوب میباشد.
در سال 1983شرکت اودتیکس[6] یک روبات شش پا ارائه کرد که می توانست از موانع عبور کند و بارهای سنگینی را نیز با خود حمل کند. در سال 1984 چند نوع سیستم برنامهریزی غیر مستقیم در نمایشگاه روبوت عرضه شد. این سیستمها این امکان را فراهم آورده که برنامه روبوت را بتوان با استفاده از تبادل گرافیکی بر روی کامپیوترهای شخصی تهیه و سپس به روبوت منتقل کرد.
درسال 1985 نخستین روباتی که به تنهایی توانایی راه رفتن داشت در دانشگاه ایالتی اهایو[7] ساخته شد. درسال 1996 شرکت ژاپنی هندا Honda نخستین روبات انسان نما را ارائه کرد که با دو دست و دو پا طوری طراحی شده بود که می توانست راه برود، از پله بالا برود، روی صندلی بنشیند و بلند شود و بارهایی به وزن 5 کیلوگرم را حمل کند.[8]
دلایل استفاده از روباتهای صنعتی
امروزه صاحبان صنایع ترجیح میدهند که روباتها را جایگزین نیروی انسانی در صنعت کنند، دلیل انتخاب روباتها را میتوان به صورت زیر عنوان کرد.
- کاهش هزینه های اجرایی
استفاده از رباتها شما را قادر می سازد که هزینه های اولیه و هزینه های پیش رو را کاهش دهید.ایجاد یک تغییر چشم گیر درصحنه رقابت و کاهش انرژی از جمله مزایای آن میباشند.بدون نیاز به هیچ ابزاری و با كمترين نیاز به روشنایی و حرارت ، ربات ها موقعیت مناسبی را برای کاهش هزینه های انرژی شما ایجاد می کنند. برآوردهای جاری نشان میدهد که به ازای هریک درجه سانتی گراد کاهش دما ، انرژی هشت درصد ذخیره می شود و با خاموش کردن وسایل روشنایی غیر ضروری تا حدود بیست درصد در مصرف انرژی صرفه جویی میشود.ربات ها همچنین می توانند هزینه های مربوط به کارگران را حذف کنند ، نه تنها هزینه های مربوط به حقوق کارگران بلکه هزینه های اضافی مانند آموزش ، سلامتی و امنیت و مسایل حقوقی را نیز حذف می کنند.
- بهبود کیفیت و ثبات محصول
توسط ربات ها شما همواره می توانید محصولات با بالاترین کیفیت را تولید نمایید ، زیرا که ماشین تحت تاثیر خستگی ، حواس پرتی و یا اثرات ناشی از امور تکراری و خسه کننده قرار نخواهد گرفت. دقت ذاتی و قابلیت تکرار آنها باعث می شود که شما همچنین بتوانید بر روی کیفیت بالا برای تولید هر محصول حساب کنید. بهبود کیفیت کار برای کارگران توسط ربات ها شما می توانید شرایط کار برای کارکنان خویش را بهبود بخشید.آنها دیگر مجبور نخواهند بود در محیط های آلوده به گرد و غبار ، محیط های گرم و یا پر خطر کار کنند. بعلاوه با آموزش نحوه ی کار با ربات ها به افراد ، آنها میتوانند مهارت های برنامه نویسی ارزشمندی را فرا گرفته و کار هیجان انگیزتری را انجام دهند.
- افزایش نرخ توليد محصولات
ربات ها میتوانند در طول شب و حین تعطیلات با اعمال نظارتی مختصر به ار خود ادامه دهند ، بنابراین شما می توانید سطح تولید خود را افزایش داده و درخواست های ضرب الاجل مشریان را برآورده نمایید.یک سیستم رباتیک باعث هدر رفتن زمان به علت تنفس ، بیماری ، حواس پرتی و یا تمرکز نمی شود.امروزه ربات ها همچنین قابلیت برنامه ریزی به صورت off-line را دارند و تجهیزات جدید جهت تولید سریع تر در حال عرضه می باشند.
- افزایش انعطاف پذیری تولید محصول
ربات ها می توانند قابلیت انعطاف پذیری خط تولید را افزایش دهند.زمانی که پروسه های مورد نیاز به کنترلر ربات انتقال پیدا میکند، شما به راحتی می توانید از یک ربات به دیگری سوییچ نمایید و با به کار گیری ابزارهای رباتیک برای تولیدات مختلف سرمایه گذاری خود را بهینه سازید.
- کاهش ضایعات تولید و افزایش راندمان
با به کارگیری ربات ها ، شما قادر خواهید بود کیفیت تولید خود را افزایش دهید.شما محصولات بیشتری مطابق با استانداردهای مربوطه خواهید داشت و در پی آن ، با کاهش مقدار ضایعات ناشی از کیفیت پایین و یا تولید ناقص محصول روبرو خواهید شد.با هر بار تولید محصولات با سطح کیفی بالا ، راندمان تولید بالا می رود.
- مطابقت بااصول ایمنی و بهبود سلامت و ایمنی محل کار
ربات ها به سادگی می توانند مانع بروز موارد ناخوشایند و دشوار و عوامل تهدید کننده سلامت که ممکن است توسط کارگران ایجاد شود گردند.شما میتوانید احتمال حوادث ناشی از تماس شخص با ماشین افزار و یا خطرات بالقوه دیگر فرآیندهای مکانیکی را کاهش دهید.همچنین ربات ها میتوانند به حذف آثار درد ناشی از فرآیندهای تکراری و شدید مانند لکه های ناشی از زخم و لرزش دست کمک کنند.
- کاهش نیاز به کارگر و دشواریهای استخدام کارگر
دقت بالای مورد نیاز پروسه های صنعتی امروزی در گرو سطحی بالا از مهارت و آموزش است.از آنجا که استخدام نیروی متخصص سخت و هزینه بردار است ، ربات ها می توانند گزینه ی مناسبی به حساب بیایند.پس از برنامه ریزی ربات ها به منظور انجام پروسه ای خاص ، آنها آماده ی شروع به کار بدون هیچگونه هزینه ی استخدام و یا آموزش می باشند.ربات ها همچنین می توانند قابلیت انعطاف پذیری بیشتری در هر دو زمینه الگوهای کاری و توانایی در اجرای امور فرآیندهای مختلف ارایه دهند.
- کاهش هزینه های سرمایه گذاری(موجودی اولیه ، کار در حال جریان)
توسط ربات ها هزینه های مواد مصرفی و نیز ضایعات کاهش پبدا می کند.بوسیله انتقال سریعتر تولیدات در صنعت تولید ، شرکت های تجاری بهتر می توانند سرعت تولید را پیش بینی نموده و نسبت به یک سرویس سریع و مطمین تصمیم گیری نمایند.
- صرفه جویی در فضا در مناطق صنعتی
ربات ها قادر هستند در سیستم های طبقه ای ، روی دیوارها و یا حتی بر روی سقف قرار گیرند.آنها همچنین می توانند به منظور کار در فضاهای محدود برنامه ریزی گردند در نتیجه نقاط ارزشمند فضای کار هدر نمی رود.
روباتهای صنعتی
ربات های صنعتی از شگفتی های دنیای مهندسی هستند . در نظر بگیرید ربات در اندازه ی یک انسان را که به سادگی توانایی حمل و جابجایی باری به وزن صد ها کیلوگرم را به صورت بسیار سریع و با قابلیت تکرارپذیری بالا دارد . [ قابلیت تکرارپذیری عنوانیست که به توانایی یک ربات در مراجعه مجدد به نقطه ای از قبل تعیین شده اطلاق می گردد . ] همچنین توانایی کار مدام و 24 ساعته در طی چندین سال و البته بی هیچ خطایی را نیز به قابلیت های فوق اضافه کنید . علی رغم امکان برنامه ریزی مجدد ربات ها ، در بسیاری از کاربرد ها ( بخصوص در صنعت خودرو ) تنها با یکبار برنامه ریزی ربات ، مدت ها یک کار ثابت را از آن انتظار دارند .
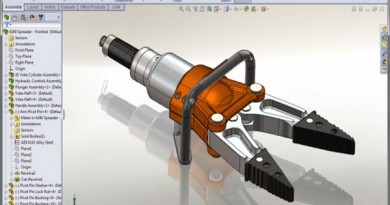
- روبات Fanuc – S-430iW
یک ربات شش محوره مانند ربات زرد رنگ شکل 4-1، در حدود 60 هزار دلار قیمت دارد. اما چیزی که جالب است هزینه استفاده و گسترش همین ربات است که بالغ بر 200 هزار دلار می شود. بنابراین بهای ربات تنها بخشی از هزینه کل سیستم است. ابزار آلات مورد نیاز ربات ها به علاوه ی برنامه ریزی آن، درصد عمده ی هزینه را به خود اختصاص می دهد. که همین امر علت اصلی عدم برنامه ریزی مجدد ربات ها ، در صنعت خودرو سازی است . در واقع اگر این صنایع، قصد تغییر کاربری ربات های خود را داشته باشند ، احتمالا از رباتی جدید استفاده خواهند کرد .

این تقریبا همان تصوری است که افراد هنگام فکر کردن به ربات های صنعتی در ذهن تصور میکنند. فانوکFanuc این گونه ی مشخص ، از ربات ها را می سازد. در واقع بزرگترین تولید کننده این گونه ربات ها است که تقریبا همواره زرد رنگ نیز هستند . این ربات ها دارای شش مفصل مستقل است که ربات شش درجه آزادی نیز خوانده میشود. چون برای تعیین موقعیت و جهت یک جسم در فضا به شش پارامتر احتیاج است . سه پارامتر موقعیت ( به طور مثال x,y,z ) و سه پارامتر جهت ( به طور مثال یاو ، پیچ ، رول ).
اگر با دقت به عکس نگاه گنید ، دو سیلندر استوانه ای را در دو طرف ربات خواهید دید . این سیلندر ها حاوی فنرهای ضد جاذبه هستند که عامل اصلی توانایی این ربات در حمل چنان بار های سنگینی می باشند . این فنر ها نقش وزنه ی تعادلی در مقابل جاذبه را بازی می کنند ، درست مانند فنر های موجود در درب های گاراژ که باعث می شود یک نفر به راحتی آن را بلند کند[1].

شکل 4-2 : کاربرد روباتهای صنعتی در جابجایی قطعات
قابلیتهای این روباتها در صنعت شامل موارد زیادی است که در ذیل به تعدادی از آنها اشاره شده است[2].
- جابجا کردن قطعات
یکی از کاربردهای این گونه روبات ها جابجا کردن قطعات مختلف، و برداشتن آنها از یک مکان و انتقال به مکان دیگری است. شکل 4-2 دو نمونه از این روبات را نشان میدهد.
- ماشینکاری
یکی دیگر از کاربردهای این گونه روباتها ماشین کاری وقراردادن و اجزاءمختلف یک قطعه در جای مشخص آن است. شکل 4-3 این کاربرد را نشان میدهد.

شکل 4-3 کاربرد روباتهای صنعتی در ماشینکاری
- قراردادن و برداشتن قطعات مختلف در ماشینهای افزار
همانگونه که میدانید تنظیم قطعات در ماشینهای ابزار کنترل عددی کاری بسیار سخت و دقیق میباشد. به این کار در اصطلاح صنعتی ساعت کردن قطعه در ماشین گفته میشود. این روباتها قطعات را به طور دقیق در جای مشخص شده در ماشین ابزار میگذارند و بر میدارند. همانگونه که در شکل 4-4 میبینید یک روبات(البته روبات مذکور نیست) در حال قراردادن قطعه در ماشین فرزکاری CNC است.

شکل 4-4 : روبات در حال قراردادن قطعه در ماشین فرز CNC
- عملیات جوشکاری
یکی دیگر از کارهایی که این گونه روبات در آن تبحر دارد قابلیت جوشکاری است. همانگونه که میدانید جوشکاری یکی از کارهای دقیق است که عدم رعایت استانداردهای آن و عدم مهارت جوشکار صدمات جبران ناپذیری را بر سازهای تحت جوش ایجاد میکند. امروزه با ورود این روباتها در صنعت، انواع جوشکاری اعم از جوشکاری نقطهای یا جوشکاری کمان…، به وسیله این روباتها انجام میشود. همانگونه که میدانید برخی از انواع جوشکاری صدمات بدنی به انسان وارد میکند استفاده از این روباتها باعث ایمنی شدن انسان در برابر خطرات ناشی از اشعههای جوشکاری نیز میشود. شکل 4-5 نمونه ای از روبات بازودار را در صنعت جوشکاری نشان میدهد.

شکل 4-5 : روبات بازودار در حال انجام جوشکاری
- انجام عملیات فورج و تغییر شکل فلزات
یکی دیگر از عملیاتی که این روباتها به خوبی انجام میدهند، پرس کردن فلزات و کمک در انجام عملیات حرارتی و سایر عملیات کلی روی روباتها است. شکل 4-6 نمونه ای از این عملیات را که به Press Tending مشهور است نشان میدهد.

شکل 4-6 : روبات بازودار در حال انجام عملیات Press Tending
- رنگ زدن
یکی از کاربردهای دیگر اینگونه روباتها در رنگزدن قطعات مختلف صنعتی خصوصا در کارخانجات ماشینسازی است. این روباتها عملیات رنگ زدن را به صورت یکنواخت و از طریق فرایند پاشیدن رنگ انجام میدهند.
- روبات اسکارا
رباتی که در شکل 4-7 نشان داده شده است، ساخت یک شرکت آمریکایی است. ادپت تکنولوژی ( هر چند ترجمه عنوان شرکت ها مرسوم نیست اما استثنا این مورد را می توان این گون ترجمه کرد “چیره دستان فناوری” ) این شرکت بزرگ ترین تولید کننده ربات در آمریکا و یکی از پیشرو های تولید ربات های نوع اسکارا SCARA در جهان به شمار می رود. گونه ی اسکارا از متداول ترین انواع ربات ها در صنعت به شمار می آیند . scara سر واژه ی کلمات .selective compliance articulated assembly robot armاین ربات دارای سه مفصل در صفحه ی افق است که به آن اجازه ی تعیین موقعیت و جهت در صفحه ی موازی با صفحه xy را می دهد. یک مفصل خطی (کشویی) نیز تعیین موقعیت در راستای محور z (عمودی) را امکان پذیر نموده است. این یک نمونه بارز از ربات “بردار و بگذار” است و هنگامی که با یک سیستم بینایی (Machine vision ) ترکیب می شود می تواند محصولات را از روی تسمه نقاله برداشته و به داخل جعبه بسته بندی منتقل نماید ؛ البته با سرعتی بسیار بالا . ساختمان مفصل ربات به آن اجازه می دهد تا نسبت به نیروهای وارده در صفحه افقی انعطاف پذیر ( یا نرم ) باشند . اهمیت این موضوع در کاربرد هایی است که باید قطعات در مکان هایی بسیار تنگ ، با دقت جاسازی شوند [2].

شکل 4-7 : روبات اسکارا
شکل 4-8 : روبات دکارتی
- روبات دکارتی
با این که نام نهادن ربات بر روی این ماشین ها عملا گسترده ترین تعریف ربات است با این حال ماشینی که در بالا می بینید یک ربات دکارتی است. علت این نام گذاری (دکارتی) نیز قابلیت تعیین موقعیت در راستای محور های x,y,z هستند. این ربات مناسب کاربرد های “بردار و بگذار” در هر دو حالت ، بدون مسیر اولیه و یا مقید به مسیر تعیین شده ( مانند قرار دادن قطعات بر روی برد الکترونیک ) می باشد[2]. کاربرد این روبات در صنایع الکترونیک و کامپیوتر بسیار زیاد است.
- روبات پوما [9]
پوما که در فارسی بدان بازوی رباتیک مفصلی نیز گفته میشود، بازویی صنعتی است که دارای ساختار RRR (یعنی سه مفصل از نوع لولایی دَوَرانی) بوده و محورهای مفاصل دوم و سوم با هم موازی باشند و آن دو بر محور مفصل اول عمود باشند. این ساختار شکلی شبیه به دست انسان را به آن میدهد. پوما دارای کاربردهای وسیعی در صنعت (مثل مونتاژ، بستهبندی، جوشکاری و غیره) است و امروزه توسط بسیاری از شرکتهای رباتسازی جهان تولید میشود[3].
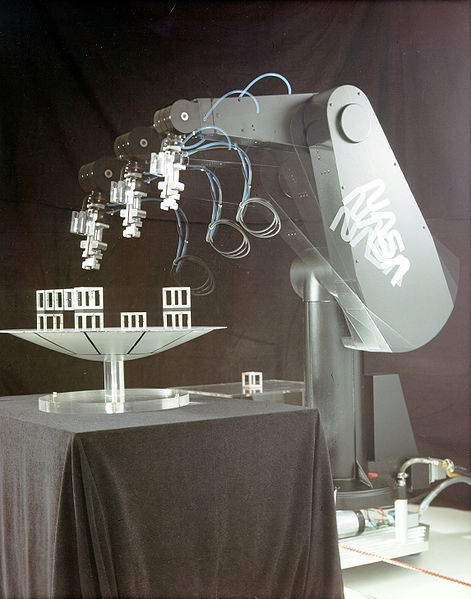
شکل 4-9: پوما یک بازوی رباتیک مفصلی در ناسا
- روبات دلتا
روبات دلتا از نوع روباتهای بازو موازی هستند. ساختار این روبات بدین صورت است که سه بازوی در انتها به یک مفصل یونیورسال متصل شده اند. به عبارتی زنجیره سینماتیکی در این روبات از ساختار زنجیره روباتهای موازی تشکیل شده است. در روباتهای موازی دو صفحه در روبروی هم قرار دارند که نسبت به هم موازی هستند.

شکل 4-10: از انواع روباتهای موازی در حال بسته بندی
این روبات در اوایل دهه هشتاد توسط پروفسور ریموند کلاول سوئیسی و تیم همکارش ساخته شد. این نوع روبات با هدف جابجا کردن لامپها و اجزاء کوچک در سرعت خیلی بالا ساخته شد. در سال 1987 یک شرکت سوئیسی از این روبات برای بستهبندی اجزاء کوچک استفاده کرد. و بعد از آن کاربرد این روبات در دنیا کسترش یافت. از جمله استفادههای این روبات در بستهبندی دارو است. شکل 4-10 این نمونه روبات را در حال قراردادن قطعات در بستهی خود نشان میدهد و شکل 4-11 نمونهی دیگری از این روبات در حال رسم شکل است[4].
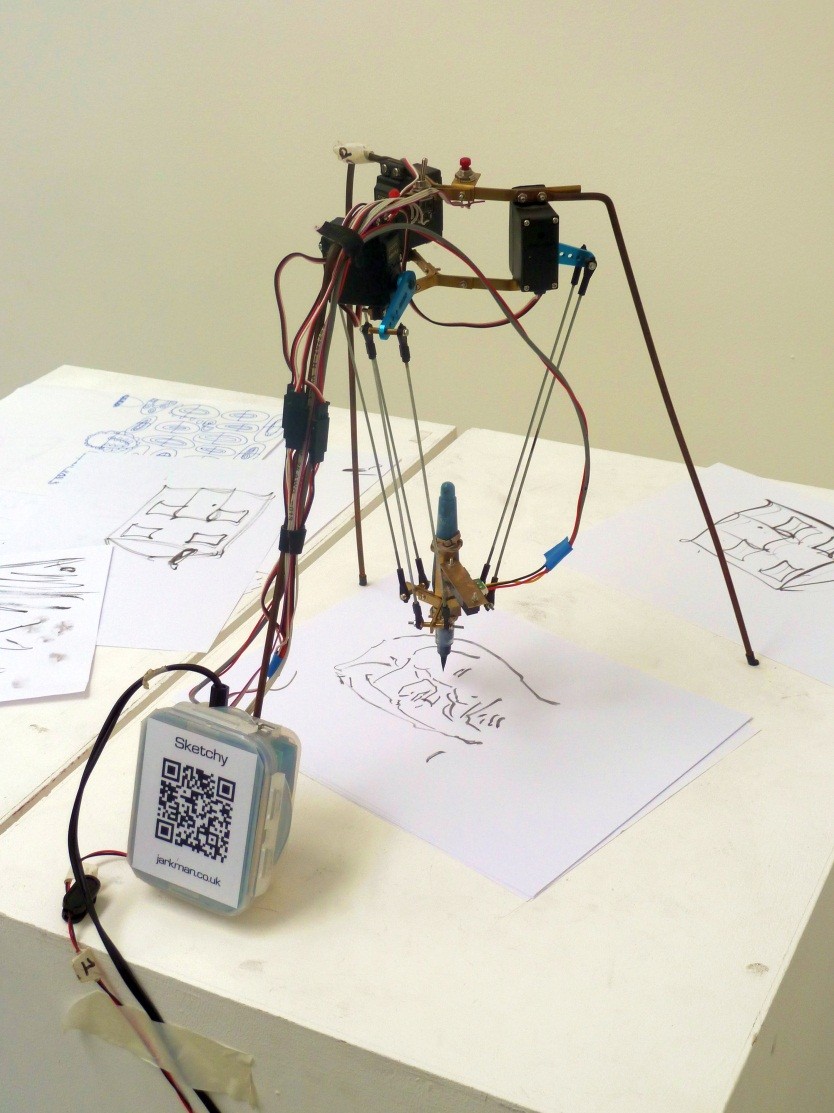
شکل 4-11 : روبات دلتا در حال ترسیم شکل
شرکتهای معروف در تولید روباتهای صنعتی
در این فصل به بررسی چند شرکت بزرگ در زمینه روباتهای صنعتی میپردازیم. این شرکتها در زمینه ساخت انواع روباتهای صنعتی فعالیت میکنند و نمایندگیهای زیادی را در سرتاسر دنیا دارند. در زیر به بررسی چند شرکت میپردازیم.
شرکت صنعتی روبات کوکا از بزرگترین شرکتهای صنعتی ساخت روبات است. دفتر اصلی این شرکت در کشور آلمان است. این شرکت نمایندگیهای بزرگی در اکثر کشورها مثل آمریکا، کانادا، مکزیک، برزیل، چین، ژاپن، کره، تایوان و اکثرکشورهای اروپایی دارد[5].

شکل 5-1 : شرکت کوکا از شرکتهای بزرگ ساخت روباتهای صنعتی
در سال 1973 کوکا اولین روبات صنعتی خود را با شش محور الکترومکانیکی محرک ساخت، این روبات موسوم به فامیولوس است. امروزه این شرکت در حال تولید روباتهای 4 تا 6 با قابلیت حمل بین3 کیلوگرم تا 1300 کیلوگرم است. روبات اسکارا، پالیتایزرز، کارتزین، و … از انواع روباتهایی هست که این شرکت تولید میکند.در شکل 5-2 انواع سینماتیکی روبات تولید شده توسط شرکت کوکا نشان داده شده است[6].
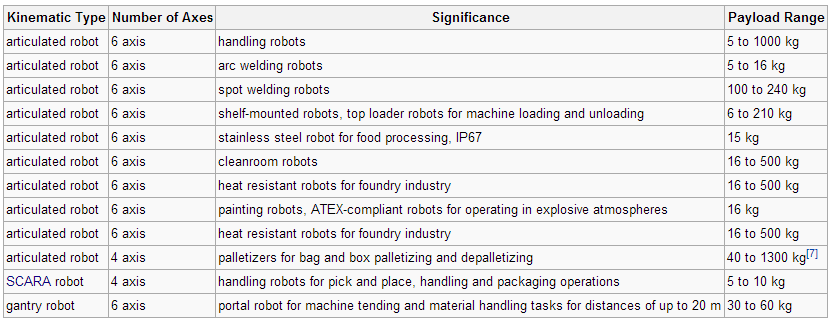
شکل 5-2 : انواع سینماتیکی روبات تولید شده توسط شرکت کوکا
شکل 5-3 : شرکت آ.ب.ب شرکتی فعال در زمینه روبات های صنعتی
شرکت صنعتی روبات آ.ب.ب نیز از بزرگترین شرکتهای صنعتی ساخت روبات است. دفتر اصلی این شرکت در کشورسوئیس است. فعالیت این کشور در صد کشور دنیا است و تعداد کارکنان این شرکت در حدود 145000 نفر است، و در آمد سالیانه این شرکت در حدود 40 بیلیون دلار است [7].
این شرکت بیش از 200000 روبات را در سراسر دنیا نصب کرده است[8]. دو نمونه از روباتهای این شرکت همراه با کارکرد آن در شکل نشان داده شده است. برای دیدن اطلاعات بیشتر راجع به این روباتها میتوان به کاتالوگهای مربوطه در رفرنس [9] مراجعه کرد.

شکل 5-4 : دو نمونه از روباتهای شرکت آ.ب.ب به همراه مشخصات آنها
بررسی مقالات روباتهای صنعتی در زمینه ساخت و تولید
در این فصل به بررسی مقالاتی در زمینه روباتهای صنعتی در رشته ساخت و تولید پرداخته شده است.
- جوشکاری به وسیله روبات و بازرسی جوش[10]
مقاله اول که مورد بررسی قرارگرفته در مورد یک سیستم روبات برای جوشکاری دریچههای مخازن GTA است. این سیستم از یک بازوی مفصلی روبات، یک مستقر کننده چرخشی، نقطه موثر برای جوش، و یک سنسور بررسی جریان گردابی و اولتراسونیک تشکیل شده است. ویژگیهایی شامل دوربین مشاهدهگر جوش، نرمافزار مدولار و فایلهای روندی تکست بیس برای پردازش مسیر حرکت است. ساختار این روبات را میتوان در شکل 6-1 میتوان دید.
مسئله اصلی گسترش تکنولوژی جوش، بازدید و تعمیر دریچه های مخازن استوانهای توسط روبات است. این تکنولوژی جدید جوش به صورتی است که نقطه اثر انتهایی روبات عمل مشعل و ماده جوش را با فاصله تنظیم شده انجام میدهد. علاوه بر این دوربینی وجود دارد که موقعیت جوش را میبیند و سنسور اسکن خط که آن را بازرسی میکند.
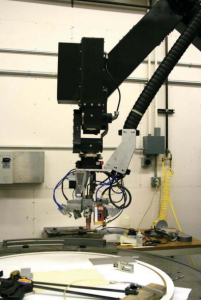
شکل 6-1: عملیات جوشکاری و بازدید جوش توسط روبات
در صورتی که موقعیت جوش و نحوه جوشکاری مناسب نباشد، دوربین اطلاعات را به لیزر اسکن خط منتقل و لیزر اسکن خط جوش را شناسایی میکند و پس از آن اگر روند جوشکاری مناسب نباشد فاصله نقطه اثر را جابجا میکند، روبات به صورت آنلاین این کار را انجام میدهد و به همین دلیل عملیات جوشکاری منظم و با کیفیت خیلی بالاتر از جوشکاری توسط انسان انجام میشود. شکل 6-2 موقعیت نقطه اثر روبات را نشان میدهد.

شکل 6-2 : موقعیت نقطه اثر روبات جوشکار برای انجام عملیات جوشکاری
همچنین در شکل 6-3 یک جفت جوش فیلت بر روی فولاد زد زنگ 316 نشان داده شده در مخزن استوانهای نشان داده شده است.

6-3: عملیات جوشکاری فیلت انجام شده توسط روبات
- بازرسی کیفیت جوش بر اساس مشاهده در جوشکاری به وسیله روبات[11]
در این کار انجام شده یک روش جدید برای بالابردن کیفیت جوشکاری ارائه شده است. همانگونه که میدانید بیشتر روشهای اتوماتیک سنتی بر اساس اطلاعات غیر قابل دیدن مانند صدا و ولتاژ، به بررسی کیفیت جوشکاری میپردازند. در این پژوهش به یک روش بررسی کیفیت جوش بر اساس مشاهده پرداخته شده است. با وجود اینکه ظاهر درز جوش تغییر کرده است، در این پژوهش تنها اطلاعات خطای آزاد مرجع استخراج شده است، و کیفیت جوش در بین تعداد فریمهای غیر مشابه ارزیابی شده است. در این آزمایش ما نشان میدهیم که این روش یک روش توانا و کارآمد با دقت جدایی بالایی از روش جوشکاری خطای آزاد است. آشکارسازی نقص جوش به صورت همزمان با کیفیت بالای بهینه سازی اطلاعات فراهم شده از کیفیت جوش توسط روبات جوشکار انجام میشود. تفاوت این جوشکاری عاری از خطای انجام شده توسط روبات با جوشکاری ناقص در شکل 6-4 آشکار است.
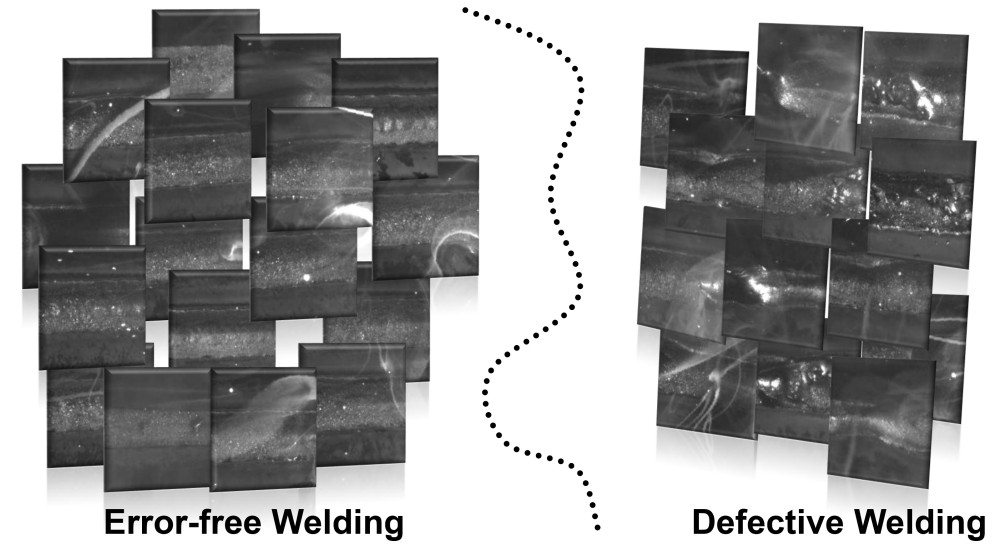
شکل 6-4: جوشکاری ناقص در مقایسه با جوشکاری عاری از خطا انجام شده توسط روبات
جوشکاری قوس الکتریکی توسط روبات به طور کسترده ای در صنعت اتوماسیون کسترش پیدا کرده است. این روش بسیار آسان، ارزان و دقیق است. با وجود اینکه دقت بالای این فرایند، هنوز بازرسی کیفیت درزهای جوش به صورت دستی انجام میشود. روشهای معمولی بازرسی جوش توسط انسان از طریق روش چشمی معمولی، بررسی صداها و توجه کردن به ولتاژ طول قوس است. روشهای اتوماسیون معمولی نیز بر پایه روشهای غیر مستقیم اندازهگیری مثل روش ولتاژ و جریان یا تفاوت در شفافیت جوش قوس الکتریکی، یا صدا یا ساختار سه بعدی شکل درز در مقابل مشعل است. مشکلی که تشخیص خطا در جوشکاری خودکار به علت تنوع زیاد فرایندها و نقصهای مختلفی است که ممکن است در جوش به وجود آید. عموما تصاویر بدست آمده از درز جوش در طی عملیات جوشکاری اتوماتیک توسط روباتها با مشکلاتی مانند دود، پاشش، تبخیر آب و اختشاشات گاز همراه است. در یک فرایند معیوب نه تنها عیب های کوچک در درز جوش آشکار است، بلکه باعث افزایش نویز به میزان زیادی میشود. در مقابل در یک فرایند بدون نقص نویز ها بسیار کاهش یافته و ظاهر جوش شکل یکنواختی دارد اما هنوز هم مقداری تغییر در یکنواختی و ظاهر آن در طی جوشکاری ایجاد میشود. در شکل 6-4 تکیه های مختلف جوش درز در دوحالت ناقص و حالت عاری از خطا که با روش اتوماتیکی ساده تکرارپذیری جوشکاری انجام شده است را نشان میدهد.
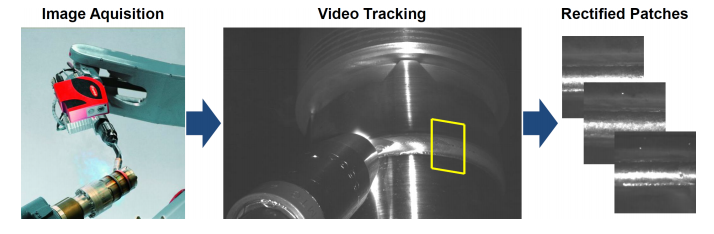
شکل 6-5 : سیستم برداشت اطلاعات برای شناسایی کیفیت جوش
همانگونه که از شکل6-4 مشخص است، جوشکاری عاری از خطای انجام شده دارای سطح کیفی بهتری نسبت به جوش ناقص است، اما در عمل این روش، روش آسانی نیست. به عبارتی در عمل نمیتوان تمام خطاهای جوش را با نشان دادن تکرارپذیری خطای جوش نشان داد و اصلاح کرد. بنابراین در این مقاله با پیشنهادی مبنی بر روش آنالیز کیفیت جوش بر مبنای مشاهده جوش ارائه شده است. این روش با استفاده از دادههای مرجع به مشاهده کیفیت جوشکاری پرداخته شده و از این رو عاری از خطا است.
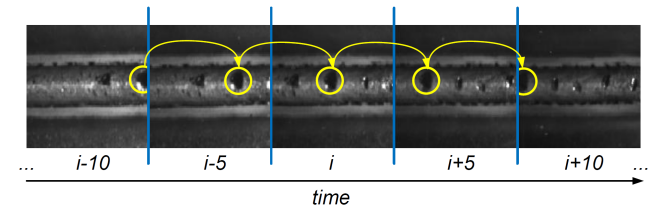
شکل 6-6: دنباله تصویر جوش گرفته شده در 20 فریم با قسمت های ناقص تاکید شده
بدینوسیله در این روش به دنبال استراتژی دستیابی به نمونههای مرجع عاری از خطا و ایجاد پایگاه داده هستیم. در طول جوشکاری تصاویر از درزهای جدید جوش داده شده بدست آورده شده و بر اساس انحراف از مرجع طبقه بندی میشوند. برای مقابله با تغییرات ظاهر درز جوش در طول کار جوشکاری ترکیب مجاورت زمانی که به طور معمول توسط مقایسه در رابطه با حرکت ربات تعریف شده پیشنهاد شده است.مکانهای بالقوه نقص درز جوش در مورد خطا نیز آشکار شده است. جدایی جوشهای بازرسی شده که عاری از خطا و نقص هستند در طول فرایند جوشکاری به صورت آنلاین انجام میشود.
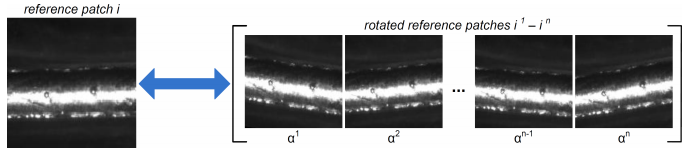
شکل 6-7: چرخش و انتقال مطابق با کیفیت جوش
اگر چه روشهایی وجود دارد که به طور خودکار به ارزیابی کیفیت جوش به کمک روباتها میپردازد، روشهایی نیز وجود دارد که به صورت آنلاین وبا ترکیب و بررسی درز جوشهای انجام شده به بهتر شدن کیفیت جوشهای بعدی میپردازد. کار اصلی انجام شده در این پژوهش معرفی یک روش بر اساس مشاهده برای بازرسی کیفیت جوشکاری توسط روبات است، همچنین دو کاربرد بر اساس روش معرفی شده به شرح زیر است: اول، طبقه بندی اتوماتیک جوشکاری کامل، و دوم، مکانبندی اتوماتیک نقصهای جوشکاری ثابت در یک نقطه است.

شکل 6-8 : نمونه هایی از تکه های اضافی باقی مانده بر روی جوش
در این مقاله به معرفی روش تحلیل کیفیت جوش مقاومی پرداخته شده است. در آزمایشهای انجام شده در این پژوهش دو کاربرد بازرسی کیفیت جوش بر اساس روشهای پیشنهاد شده ارائه شده است. این روش در چندین فرایندهای جوشکاری ارزیابی شده و محدودهی وسیعی از جوشکاریهای صنعتی توسط روبات را پوشش میدهد. با توجه به جدایی جوش در روش ناقص و روش عاری از خطا به میانگین دقت 94 درصد در روش عاری از خطا رسیده شده است. بعلاوه، یکی از مزایای این روش استفاده از تعداد دادههای غیر منفی مرجع است. تولید داده های که عموما ده تا بیست درصد از مرکز خوشه هستند. این نتایج هزینه ها را برای تولید داده های مرجع کاهش و به صورت انلاین این کار را انجام میدهد. کاربردهای صنعتی عموما به درجه بالایی از مقاوم بودن و عملکرد همزمان نیاز دارد. نتایج آزمایشگاهی نشان میدهد که جدایی در دنباله جوشکاری در جوشکاری ناقص و جوشکاری عاری از خطا امکانپذیر، دقیق و سریع است. بعلاوه مکانیابی عیوب جوش به خاطر ترکیب اطلاعات حرکت روبات ممکن است. با در نظر گرفتن مقدار دادههای مرجع استفاده شده برای مراحل اولیه، نتایج آموزش داده شده بیشتری در مدلهای پردازش شده جوشکاری برای آشکارسازی جوشهای ناقص ایجاد میشود. همچین مشخص شد که تشابه انتخاب متریک (NCC) نمیتواند با نور شدید و شدت تغییرات ایجاد شده توسط اغتشاشات گاز مقابله کند. در این کار همچنین میشد به طبقه بندی تکه های تصویر دارای مشکل و شکل و پهنای درز برای شناخت کیفیت جوش پرداخته شود.
منابع
[1] http://learnaboutrobots.com/industrial.htm
[2] http://www.eurobots.net/desc/id/46/Fanuc-S-430iW-robots-en.html
[3] http://en.wikipedia.org/wiki/Programmable_Universal_Machine_for_Assembly
[4] http://en.wikipedia.org/wiki/Delta_robot
[5] http://en.wikipedia.org/wiki/KUKA
[6] http://www.kuka-robotics.com/en/
[7] http://en.wikipedia.org/wiki/ABB_Group
[9]http://www05.abb.com/global/scot/scot241.nsf/veritydisplay/2333033d1110b811c125795f003ecf56/$file/Product%20Range%202011_US%20Version.pdf
[10] H. B. Smartt,D. P. Pace,E. D. Larsen,T. R. McJunkin,C. I. Nichol,D. E. Clark,K. L. Skinner,” Robotic Welding and Inspection System” ,2008.
[11] Markus Heber, Christian Reinbacher, Matthias Ruther, Horst Bischof, “Vision-Based Quality Inspection in Robotic Welding”,2010.
(بدلیل اینکه برخی از مطالب مربوط به ماهای گذشته است ممکن است برخی از لینک ها در منابع تغییر کرده باشند.)