تحلیل دینامیکی چرخدنده ها در نرم افزار آدامز (Adams)
تحلیل دینامیکی چرخدنده ها در نرم افزار آدامز (Adams)
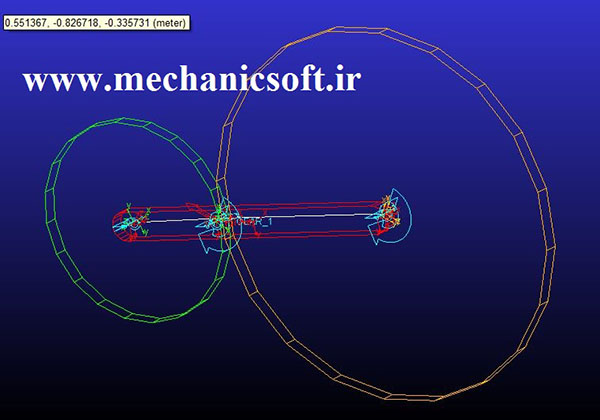
همانگونه که میدانید نرم افزار آدامز را میتوان قویترین نرم افزار تحلیل دینامیکی دانست. در نرم افزار آدامز برقرای ارتباط بین بسیاری از مفاصل ساده است. یکی از پیچیده ترین مسائل نرم افزار آدامز برقراری ارتباط بین چرخدنده ها و تماس بین آنهاست. در این ارتباط باید دو چرخدنده باید حتما به یک میله واسطه اتصال داشته باشند و برای تعریف مشخصات اتصال چرخدنده ای باید حتما یک مارکر روی میله واسطه باشد به گونه ای که جهت Z مارکر در جهت سرعت خطی محل اتصال چرخدنده ها باشد(مهمترین نکته در تماس دینامیکی چرخدنده ها). امروز فایل ویدیویی از اتصال چرخدنده ها که توسط مکانیک سافت در نرم افزار ادامز صورت گرفته به همراه فایل انجام شده ی آن در نرم افزارآدامز و همچنین هلپ بسیار خلاصه ای از نحوه اتصال چرخدنده ها را برای شما آماده کرده ایم. در صورت داشتن هر گونه سوال از این موضوع، یا موضوعات دیگر و یا درخواست پروژه میتوانید به پروفایل مدیر سایت مراجعه کنید.
مشاهده فیلم تحلیل دینامیکی چرخدنده ها در نرم افزار آدامز
دانلود فایل اصلی تحلیل چرخدنده در نرم افزار آدامز
سلام با تشکر از سایت عالیتون
ببخشید چطوری میشه در adams غلتش رو طراحی کرد ؟
ممنون
شما به دو روش میتونید.
یکی بیاد و کانتکت تعریف کنید که در این صورت در تنظمات کانتکت میتونید غلتش همراه لغزش رو به طور وارد کنید. و هم می توانید در تعریف کانتکت با مشخص کردن ضرایب اصطکاک استاتیکی و دینامیکی غلتش رو مدل کنید. روش دوم اگر معادلاتتون غلتش تام هستند. پس روابط رو می تونید مستقیما به صورت تابعی از جابجایی زاویه ای وارد کنید.
به خاطر اینکه در غلتش تام جابجایی خطی و زاویه ای با رابطه ی x=r*theta با هم در ارتباط هستند.
خیلی ممنون ، بسیار مفید بود .