
توضیحات
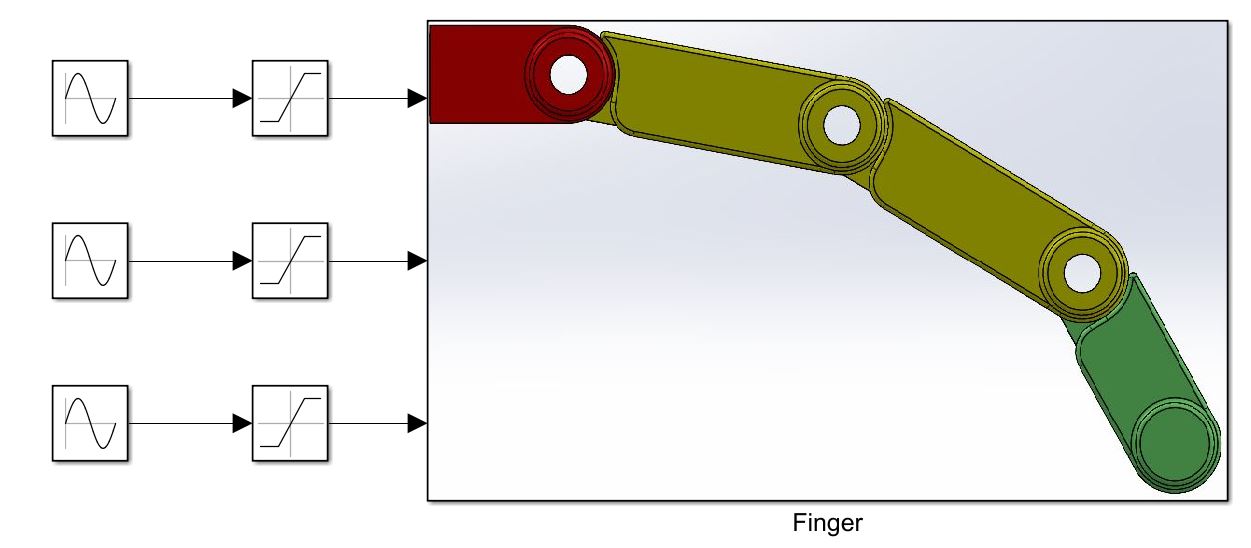
در این آموزش یک مدل از انگشت روبات سه درجه آزادی که در نرم افزار سالیدورکز آماده شده است توسط بسته ی سیم اسکیپ مالتی بادی مدلسازی و تحلیل دینامیکی میشود. نرم افزار سیم اسکیپ یک بسته ی تحلیلی در نرم افزار متلب است که تحلیل های دینامیکی چند جسمی را انجام میدهد. این مجموعه شامل مدل سالیدورکز، مدلسازی سیم اسکیپ و همچنین یک فایل آموزشی از مراحل انجام شبیه سازی در نرم افزار است. محتوای اموزشی و مدلسازی انجام شده توسط دکتر محسن رضائی ( دکتری مکانیک از دانشگاه شیراز ) تهیه شده است.
فایل شامل:
1- مدل سه بعدی
2- فایل شبیه سازی سیم اسکیپ
3- فایل توضیحات آموزشی
4- ویدیو و عکس های شبیه سازی
است.
جهت خرید فایل به فروشگاه مکانیک سافت در فایل سل مراجعه نمایید.
در صورت هرگونه مشکل با شماره 09369074440 تماس بگیرید.
اموزش روبات در سیم اسکیپ مالتی بادی[/caption]


نقد و بررسیها
هنوز بررسیای ثبت نشده است.